Advances in Kriging-Based Autonomous X-Ray Scattering Experiments
Citation
Noack, M.M.; Doerk, G.S.; Li, R.; Fukuto, M.; Yager, K.G. "Advances in Kriging-Based Autonomous X-Ray Scattering Experiments"
Scientific Reports 2020,
10 1325.
doi: 10.1038/s41598-020-57887-xSummary
We demonstrate improved algorithms/methods for controlling scientific instruments, paving the way to autonomous experimentation. Improvements allow features of the data-space to be considered, as well as experimental costs. We deploy these methods on an x-ray scattering beamline.
Abstract
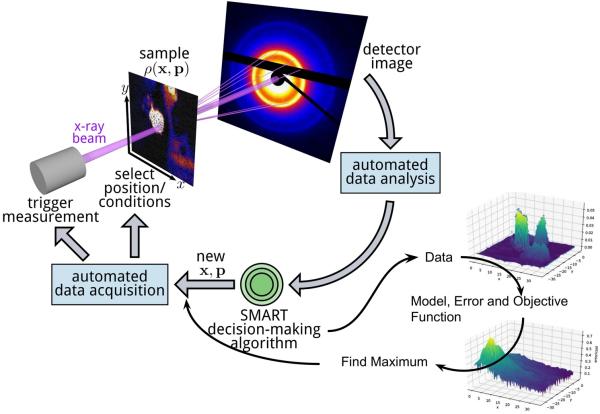
Autonomous experimentation is an emerging paradigm for scientific discovery, wherein measurement instruments are augmented with decision-making algorithms, allowing them to autonomously explore parameter spaces of interest. We have recently demonstrated a generalized approach to autonomous experimental control, based on generating a surrogate model to interpolate experimental data, and a corresponding uncertainty model, which are computed using a Gaussian process regression known as ordinary Kriging (OK). We demonstrated the successful application of this method to exploring materials science problems using x-ray scattering measurements at a synchrotron beamline. Here, we report several improvements to this methodology that overcome limitations of traditional Kriging methods. The variogram underlying OK is global and thus insensitive to local data variation. We augment the Kriging variance with model-based measures, for instance providing local sensitivity by including the gradient of the surrogate model. As with most statistical regression methods, OK minimizes the number of measurements required to achieve a particular model quality. However, in practice this may not be the most stringent experimental constraint; e.g. the goal may instead be to minimize experiment duration or material usage. We define an adaptive cost function, allowing the autonomous method to balance information gain against measured experimental cost. We provide synthetic and experimental demonstrations, validating that this improved algorithm yields more efficient autonomous data collection.
